
Controla la velocidad de un motor con Arduino y LabVIEW usando PWM
El Arduino es una plataforma muy versátil y popular que permite a los aficionados y profesionales de la electrónica crear y controlar una amplia variedad de proyectos. Una de las tareas más comunes es controlar la velocidad de un motor, ya sea para regular la velocidad de un ventilador, un robot o cualquier otro dispositivo mecánico.
Te mostraremos cómo utilizar Arduino en combinación con LabVIEW para controlar la velocidad de un motor utilizando la técnica de modulación por ancho de pulso (PWM). Explicaremos los conceptos básicos de PWM, te guiaremos a través de los pasos necesarios para configurar el Arduino y LabVIEW, y finalmente te proporcionaremos un ejemplo práctico para que puedas implementarlo en tus propios proyectos. ¡Prepárate para darle a tu motor una nueva velocidad!
- Cómo funciona el control de velocidad de un motor utilizando PWM
- Cuáles son las ventajas de utilizar Arduino y LabVIEW en el control de velocidad de un motor
- Qué es LabVIEW y cómo se utiliza en el control de motores con Arduino
- Qué es PWM y cómo se utiliza para controlar la velocidad de un motor
- Cuál es la diferencia entre PWM analógico y PWM digital
- Qué tipo de motores se pueden controlar utilizando Arduino y LabVIEW con PWM
- Cuáles son los componentes necesarios para controlar la velocidad de un motor con Arduino y LabVIEW usando PWM
- Cuáles son los pasos para programar un Arduino y configurar LabVIEW para controlar la velocidad de un motor con PWM
- Existen alternativas a Arduino y LabVIEW para controlar la velocidad de un motor con PWM
- Es posible controlar la velocidad de un motor utilizando solamente Arduino o solamente LabVIEW, sin la necesidad de combinar ambos
- Preguntas frecuentes (FAQ)
Cómo funciona el control de velocidad de un motor utilizando PWM
Para controlar la velocidad de un motor utilizando Arduino y LabVIEW, se utiliza una técnica llamada PWM (Modulación por Ancho de Pulso), por sus siglas en inglés. La idea detrás de la técnica PWM es controlar la cantidad de tiempo en que una señal está en alto (encendida) y en bajo (apagada) durante un período de tiempo determinado.
En el caso de un motor, la señal PWM se utiliza para controlar la cantidad de potencia que se le suministra. Cuando la señal está en alto, el motor recibe potencia y gira a una velocidad determinada. Cuando la señal está en bajo, el motor no recibe potencia y se detiene. Al variar el ancho de pulso de la señal PWM, es posible controlar la velocidad del motor.
¿Cómo se implementa el control de velocidad con Arduino y LabVIEW?
Para implementar el control de velocidad de un motor utilizando Arduino y LabVIEW, se requieren los siguientes componentes:
- Arduino: una placa de desarrollo que se encargará de generar la señal PWM.
- LabVIEW: un software de programación gráfica utilizado para diseñar la interfaz de control.
- Driver del motor: un dispositivo que se encargará de amplificar la señal PWM generada por Arduino.
- Motor: el motor que se desea controlar.
El proceso para implementar el control de velocidad es el siguiente:
- Conectar el Arduino al ordenador y programarlo para generar la señal PWM.
- Diseñar la interfaz de control utilizando LabVIEW.
- Conectar el Arduino al driver del motor.
- Conectar el motor al driver.
- Probar el sistema y ajustar los parámetros de control según sea necesario.
Una vez implementado el sistema, es posible controlar la velocidad del motor utilizando la interfaz diseñada en LabVIEW. Esto permite ajustar la velocidad del motor de forma precisa y repetible, lo cual es especialmente útil en aplicaciones donde se requiere un control preciso, como en el caso de robots o maquinaria automatizada.
Cuáles son las ventajas de utilizar Arduino y LabVIEW en el control de velocidad de un motor
Utilizar Arduino y LabVIEW para controlar la velocidad de un motor presenta varias ventajas. En primer lugar, Arduino es una plataforma de código abierto que permite una fácil programación y configuración del motor. LabVIEW, por otro lado, es un software de desarrollo de sistemas que proporciona una interfaz gráfica intuitiva para controlar y monitorear el motor.
Una de las principales ventajas de esta combinación es la flexibilidad que ofrece. Tanto Arduino como LabVIEW son altamente personalizables y se pueden adaptar a diferentes necesidades y requerimientos del proyecto. Además, el uso de Arduino permite una mayor integración con otros dispositivos y sensores, lo que facilita la implementación de sistemas más complejos.
Otra ventaja importante es la disponibilidad de recursos y documentación. Tanto Arduino como LabVIEW tienen una gran comunidad de usuarios que comparten sus experiencias, proyectos y soluciones en línea. Esto facilita el aprendizaje y la resolución de problemas, lo que resulta en un desarrollo más rápido y eficiente del control de velocidad del motor.
Además, esta combinación ofrece un alto grado de precisión y control. El uso de la modulación por ancho de pulso (PWM) permite ajustar la velocidad del motor con gran precisión, lo que es especialmente útil en aplicaciones que requieren un control fino.
Utilizar Arduino y LabVIEW en el control de velocidad de un motor proporciona flexibilidad, integración, disponibilidad de recursos y precisión, lo que facilita el desarrollo de sistemas eficientes y personalizados.
Qué es LabVIEW y cómo se utiliza en el control de motores con Arduino
LabVIEW es un lenguaje de programación gráfico desarrollado por National Instruments que se utiliza ampliamente en el campo de la automatización y el control. Permite la creación de interfaces de usuario, el análisis de datos y el control de dispositivos, como motores, a través de una interfaz gráfica intuitiva.
En el caso específico del control de motores con Arduino, LabVIEW ofrece una amplia gama de funciones y herramientas que facilitan la programación y el monitoreo de la velocidad del motor. Al utilizar la técnica de modulación por ancho de pulso (PWM), es posible controlar de manera precisa la velocidad de un motor conectado a un Arduino mediante LabVIEW.
El flujo de trabajo típico implica crear un programa en LabVIEW que se comunique con Arduino a través de una conexión serial. Esto permite enviar comandos de control de velocidad al Arduino y recibir información de retroalimentación para monitorear la velocidad actual del motor en tiempo real.
Qué es PWM y cómo se utiliza para controlar la velocidad de un motor
PWM, o Modulación por Ancho de Pulso en español, es una técnica utilizada para controlar la velocidad de un motor. Se basa en el principio de variar el ancho de un pulso de señal eléctrica para controlar la cantidad de energía suministrada al motor. Esto se logra alternando entre periodos de tiempo en los que la señal está en alto y en bajo.
Para controlar la velocidad del motor utilizando PWM, se utilizan dispositivos como Arduino y LabVIEW. Estos dispositivos generan una señal PWM con una frecuencia específica y un ciclo de trabajo variable. El ciclo de trabajo determina qué porcentaje de tiempo la señal permanece en alto y qué porcentaje permanece en bajo.
Al variar el ciclo de trabajo de la señal PWM, se puede controlar la velocidad del motor. Un ciclo de trabajo del 100% significa que la señal está en alto durante todo el periodo, lo que resulta en la máxima velocidad del motor. Por otro lado, un ciclo de trabajo del 0% significa que la señal está en bajo durante todo el periodo, lo que detiene el motor por completo.
PWM es una técnica eficiente y precisa para controlar la velocidad de un motor. Arduino y LabVIEW son herramientas populares para generar señales PWM y controlar la velocidad de los motores de manera sencilla.
Cuál es la diferencia entre PWM analógico y PWM digital
Para controlar la velocidad de un motor con Arduino y LabVIEW, es importante comprender la diferencia entre PWM analógico y PWM digital.
El PWM analógico es una técnica que modifica la amplitud de la señal de voltaje para controlar la velocidad del motor. Esto se logra al variar el tiempo que la señal está en estado alto (encendido) y en estado bajo (apagado). La cantidad de tiempo que la señal está en estado alto determina la velocidad del motor.
Por otro lado, el PWM digital utiliza una señal digital de encendido o apagado. La velocidad del motor se controla variando la relación entre el tiempo de encendido y el tiempo total del ciclo de trabajo. Esto se logra utilizando una señal digital y cambiando rápidamente entre estados de encendido y apagado.
Aunque ambas técnicas permiten controlar la velocidad del motor, el PWM digital proporciona una mayor precisión y estabilidad en comparación con el PWM analógico. Además, el uso de PWM digital es más común en proyectos de Arduino y LabVIEW debido a su facilidad de implementación y mayor control sobre la velocidad del motor.
Qué tipo de motores se pueden controlar utilizando Arduino y LabVIEW con PWM
Existen diferentes tipos de motores que se pueden controlar utilizando Arduino y LabVIEW con PWM. Uno de los motores más comunes es el motor de corriente continua (DC), estos motores son ampliamente utilizados en aplicaciones que requieren un control preciso de la velocidad, como en robots, drones y vehículos eléctricos.
Otro tipo de motor que se puede controlar es el motor paso a paso. Estos motores son ideales cuando se necesita un control de posición preciso, ya que se pueden mover en incrementos discretos. Son ampliamente utilizados en impresoras 3D, equipos de automatización industrial y máquinas CNC.
Además, es posible controlar motores de corriente alterna (AC) utilizando un driver adecuado y técnicas de modulación de ancho de pulso (PWM). Esto abre las puertas a controlar motores más potentes y utilizados en aplicaciones como sistemas de climatización, bombas de agua y ventiladores.
Con Arduino y LabVIEW utilizando PWM se pueden controlar diferentes tipos de motores, desde motores de corriente continua hasta motores paso a paso y motores de corriente alterna, lo que brinda una amplia gama de posibilidades para proyectos electrónicos y de automatización.
Cuáles son los componentes necesarios para controlar la velocidad de un motor con Arduino y LabVIEW usando PWM
Para controlar la velocidad de un motor con Arduino y LabVIEW usando PWM, necesitarás los siguientes componentes:
1. Arduino Uno
El Arduino Uno es una placa de desarrollo basada en el microcontrolador ATmega328P. Es ideal para proyectos de electrónica y robótica debido a su amplia compatibilidad y facilidad de uso.
2. Motor DC
Necesitarás un motor de corriente continua (DC) para poder controlar su velocidad. Los motores DC son ampliamente utilizados en aplicaciones robóticas y de automatización debido a su simplicidad y versatilidad.
3. Puente H
El puente H es un circuito integrado que permite el control bidireccional de corriente en motores DC. Es necesario para controlar la velocidad y dirección del motor.
4. LabVIEW
LabVIEW es un entorno de desarrollo de sistemas visuales que permite la programación gráfica de aplicaciones de control y adquisición de datos. Es utilizado para diseñar la interfaz de usuario y controlar el Arduino en este proyecto.
5. Cables y resistencias
Necesitarás cables para conectar los componentes entre sí y resistencias para limitar la corriente en el circuito.
Cuáles son los pasos para programar un Arduino y configurar LabVIEW para controlar la velocidad de un motor con PWM
Para controlar la velocidad de un motor con Arduino y LabVIEW utilizando PWM, es necesario seguir algunos pasos clave. En primer lugar, necesitarás tener un motor compatible con Arduino y un Arduino board.
Una vez que tengas los materiales necesarios, el siguiente paso es conectar el motor al Arduino utilizando los pines adecuados. Por lo general, se utilizan los pines digitales con capacidad de PWM, como los pines 3, 5, 6, 9 o 10.
A continuación, debes programar el Arduino utilizando el software Arduino IDE. Puedes comenzar importando la librería "Servo.h" para poder utilizar las funciones de PWM. Luego, deberás definir el pin al que conectaste el motor y crear una instancia de la clase Servo.
Después de esto, puedes utilizar la función "attach()" para asociar el pin del motor con la instancia del Servo. Luego, puedes utilizar la función "write()" para establecer la velocidad del motor utilizando un valor entre 0 y 180.
Para interactuar con el Arduino desde LabVIEW, deberás configurar la comunicación serial entre ambos. Puedes utilizar el módulo "MakerHub LINX" en LabVIEW para facilitar esta comunicación.
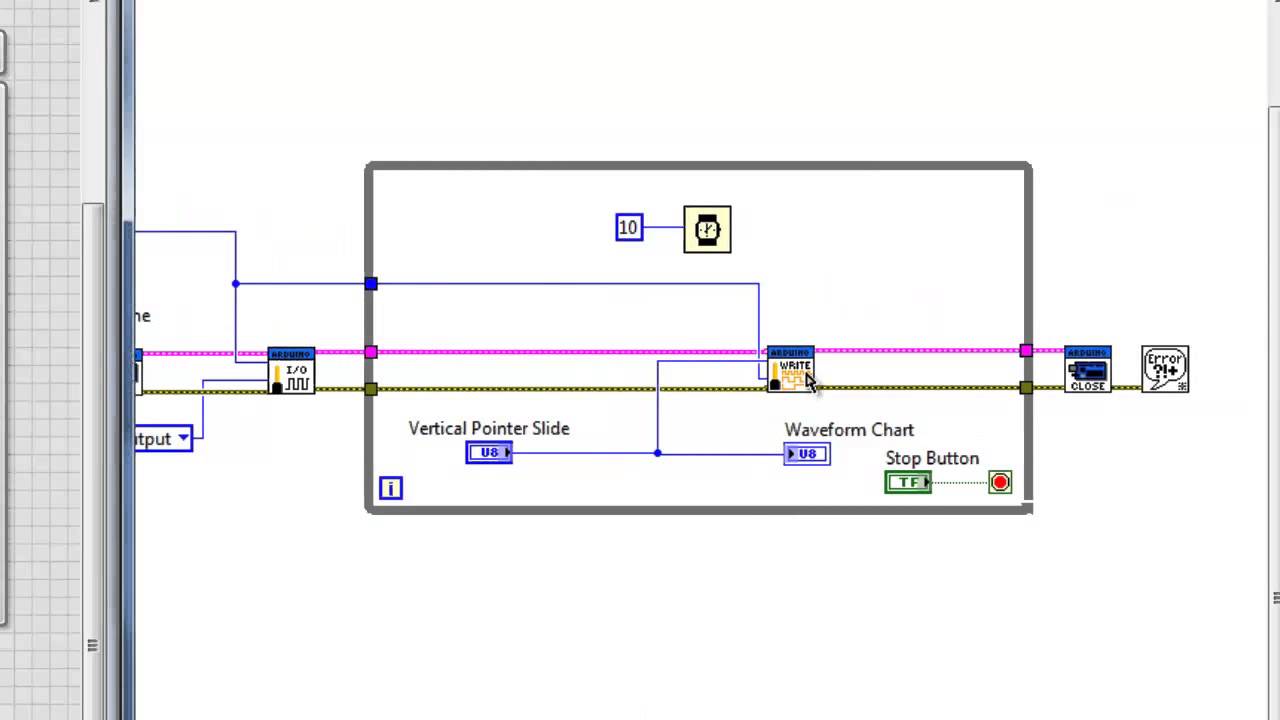
Una vez que hayas configurado la comunicación serial, puedes utilizar LabVIEW para controlar la velocidad del motor. Puedes crear una interfaz gráfica de usuario en LabVIEW que te permita ajustar la velocidad del motor utilizando controles deslizantes o botones.
Finalmente, podrás ejecutar el programa en LabVIEW y controlar la velocidad del motor en tiempo real. Recuerda que podrás ajustar la velocidad del motor utilizando los valores de PWM que van desde 0 hasta 180.
Controlar la velocidad de un motor con Arduino y LabVIEW utilizando PWM puede ser una tarea desafiante, pero siguiendo los pasos adecuados, podrás lograrlo de manera efectiva. La clave está en la conexión correcta del motor al Arduino, la programación adecuada del Arduino utilizando el software Arduino IDE y la configuración de la comunicación serial entre Arduino y LabVIEW.
Una vez que hayas dominado estos pasos, podrás crear proyectos interesantes que involucren el control de motores con LabVIEW y Arduino, lo que te permitirá explorar aún más las posibilidades de la electrónica y la programación.
Existen alternativas a Arduino y LabVIEW para controlar la velocidad de un motor con PWM
Aunque Arduino y LabVIEW son opciones populares para controlar la velocidad de un motor utilizando la técnica de PWM (Modulación por Ancho de Pulso), existen otras alternativas que también pueden ser consideradas.
Una de estas alternativas es Raspberry Pi. Este microordenador de bajo costo ofrece flexibilidad y potencia para controlar la velocidad de un motor mediante PWM. Además, Raspberry Pi cuenta con una amplia comunidad de usuarios que comparten proyectos y soluciones en línea.
Otra opción es utilizar microcontroladores PIC, que ofrecen una amplia gama de opciones para implementar PWM y controlar la velocidad de un motor de manera precisa. PIC es una opción popular en la industria debido a su rendimiento confiable y su capacidad para manejar múltiples tareas.
Además, es posible utilizar plataformas en la nube como Arduino Cloud o AWS IoT Core para controlar la velocidad de un motor de forma remota. Estas soluciones permiten acceder y controlar el motor desde cualquier lugar, lo que es especialmente útil en aplicaciones distribuidas o basadas en la web.
Si bien Arduino y LabVIEW son opciones populares para controlar la velocidad de un motor con PWM, existen alternativas como Raspberry Pi, microcontroladores PIC y plataformas en la nube que también pueden ser consideradas en función de los requisitos del proyecto.
Es posible controlar la velocidad de un motor utilizando solamente Arduino o solamente LabVIEW, sin la necesidad de combinar ambos
Arduino y LabVIEW son dos herramientas ampliamente utilizadas en proyectos de automatización y control. Ambos ofrecen la posibilidad de controlar la velocidad de un motor utilizando la técnica de modulación por ancho de pulso (PWM). Sin embargo, es importante destacar que es posible controlar la velocidad de un motor utilizando solamente Arduino o solamente LabVIEW, sin la necesidad de combinar ambos.
Arduino es una plataforma de prototipado electrónico que permite programar y controlar dispositivos de manera sencilla. Utilizando el lenguaje de programación de Arduino, es posible generar señales PWM que permiten regular la velocidad de un motor. Mediante la programación de los ciclos de trabajo de estas señales, se puede controlar la velocidad de giro del motor de forma precisa.
Por otro lado, LabVIEW es un entorno de desarrollo gráfico que permite controlar dispositivos y adquirir datos de manera intuitiva. Utilizando los bloques de función de LabVIEW, es posible generar señales PWM y controlar la velocidad de un motor. Mediante la configuración de los parámetros de estos bloques, se puede ajustar la velocidad de giro del motor de manera precisa y visual.
Tanto Arduino como LabVIEW ofrecen la posibilidad de controlar la velocidad de un motor utilizando PWM. Sin embargo, es importante tener en cuenta que cada herramienta tiene sus propias ventajas y desventajas. Es posible utilizar solamente Arduino o solamente LabVIEW, dependiendo de las necesidades y preferencias del proyecto.
Preguntas frecuentes (FAQ)
1. ¿Qué es el PWM?
El PWM (Pulse Width Modulation) es una técnica utilizada para controlar la velocidad de un motor o la intensidad de una señal utilizando una señal digital.
2. ¿Cómo funciona el control de velocidad de un motor con PWM?
El control de velocidad de un motor con PWM se realiza cambiando la duración del pulso de una señal digital. Al variar el ancho del pulso, se puede controlar la velocidad del motor.
3. ¿Qué es Arduino y LabVIEW?
Arduino es una plataforma de desarrollo de hardware de código abierto basada en microcontroladores, mientras que LabVIEW es un software de desarrollo de sistemas de prueba y control basado en gráficos.
4. ¿Es necesario tener conocimientos de programación para controlar un motor con Arduino y LabVIEW?
Es recomendable tener conocimientos básicos de programación para poder utilizar estas herramientas, pero no es imprescindible. Existen tutoriales y ejemplos de código que pueden facilitar el proceso.
5. ¿Puedo utilizar otros microcontroladores en lugar de Arduino?
Sí, se pueden utilizar otros microcontroladores compatibles con LabVIEW, como el Raspberry Pi o el ESP8266, para controlar la velocidad de un motor usando PWM.
Te va a interesar